Raspberry Pi 3 + Pixhawk :以Mavlink協定連接(macOS)
前置作業:在Raspberry Pi 3安裝好Raspbian OS
A.以SSH連接Raspberry Pi 3
1.先測試Ping的到Raspberry Pi 3(ping 192.168....)
2.確認Raspberry Pi 3 IP位址後,打開電腦SSH工具(Windows可以下載Putty)
3.輸入
ssh pi@樹梅派的IP
4.輸入密碼(預設是raspberry),正確無誤的話可以開始控制樹梅派
B.設定Raspberry Pi 3
1.打開終端機,依序輸入下列指令
sudo apt-get update sudo apt-get install screen python-wxgtk2.8 python-matplotlib python-opencv python-pip python-numpy python-dev libxml2-dev libxslt-dev sudo pip install future sudo pip install pymavlink sudo pip install mavproxy
C.連接Raspberry Pi 3和Pixhawk
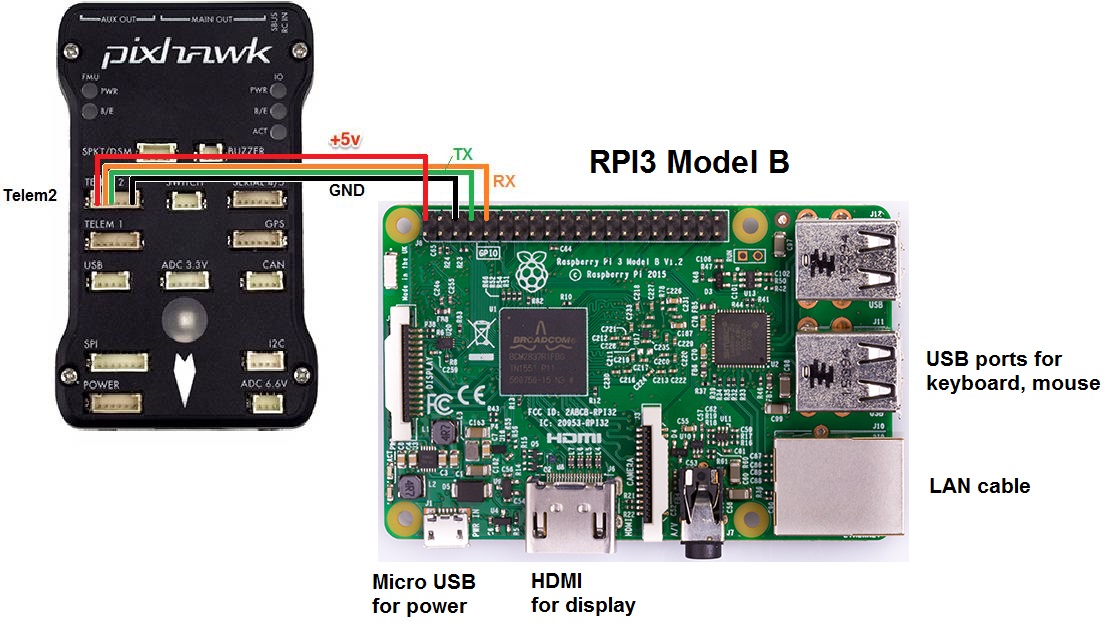
可以買現成的杜邦線,但頭一定要能插進去Pixhawk的孔。
注意! 當Raspberry Pi 3是額外接穩定的5V電源時,千萬不要再接上圖的紅線,會燒掉
D.設定Pixhawk
1.以電腦開啟Mission Planner,透過USB to Micro USB接上Pixhawk
2.選擇COM?,然後以115200連接
3.等載入完設定,選擇上方的"配置/測試",點選左側的"Full Parameter List"
4.找到SERIAL2_BAUD這個參數,雙擊數值欄位,改成57(代表57600)
5.找到SERIAL2_PROTOCOL,值改成1,儲存

E.開始測試
1.輸入
mavproxy.py --master=/dev/serial0 --baudrate 57600 -- aircraft MyCopter
2.如果正確的話會出現下圖

3.接著測試MAVProxy正確開啟,依序輸入,如果輸入第一行有顯示ARMING_CHECK為1.000000表示開啟
param show ARMING_CHECK param set ARMING_CHECK 0 arm throttle
4.輸入mode可以看到支援的模式
5.最後可以試著輸入"apm safetyoff",如果Pixhawk有裝安全鈕,應該會停止閃爍,解鎖。

F.常用指令
1.arm + check|uncheck|list|throttle(可用來判斷是否成功連接)|safetyon(安全鈕亮)|safetyoff(安全紐關)
2.param + fetch|save|set|show|load|preload|forceload|diff|download|help
(輸入show可以顯現所有無人機參數,set去修改,再save儲存)
G.參考網站:
1.官網
2.國外教學影片
H.測試環境:
可直接使用pixhawk的micro usb連接macbook進行供電,可進行腳本測試,但電力不足以供應電調操控螺旋槳,樹梅派使用外部電源供應即可。

留言
張貼留言